- · 传感器与微系统版面费是[06/30]
- · 《传感器与微系统》投稿[06/30]
- · 《传感器与微系统》期刊[06/30]
一、稿件要求: 1、稿件内容应该是与某一计算机类具体产品紧密相关的新闻评论、购买体验、性能详析等文章。要求稿件论点中立,论述详实,能够对读者的购买起到指导作用。文章体裁不限,字数不限。 2、稿件建议采用纯文本格式(*.txt)。如果是文本文件,请注明插图位置。插图应清晰可辨,可保存为*.jpg、*.gif格式。如使用word等编辑的文本,建议不要将图片直接嵌在word文件中,而将插图另存,并注明插图位置。 3、如果用电子邮件投稿,最好压缩后发送。 4、请使用中文的标点符号。例如句号为。而不是.。 5、来稿请注明作者署名(真实姓名、笔名)、详细地址、邮编、联系电话、E-mail地址等,以便联系。 6、我们保留对稿件的增删权。 7、我们对有一稿多投、剽窃或抄袭行为者,将保留追究由此引起的法律、经济责任的权利。 二、投稿方式: 1、 请使用电子邮件方式投递稿件。 2、 编译的稿件,请注明出处并附带原文。 3、 请按稿件内容投递到相关编辑信箱 三、稿件著作权: 1、 投稿人保证其向我方所投之作品是其本人或与他人合作创作之成果,或对所投作品拥有合法的著作权,无第三人对其作品提出可成立之权利主张。 2、 投稿人保证向我方所投之稿件,尚未在任何媒体上发表。 3、 投稿人保证其作品不含有违反宪法、法律及损害社会公共利益之内容。 4、 投稿人向我方所投之作品不得同时向第三方投送,即不允许一稿多投。若投稿人有违反该款约定的行为,则我方有权不向投稿人支付报酬。但我方在收到投稿人所投作品10日内未作出采用通知的除外。 5、 投稿人授予我方享有作品专有使用权的方式包括但不限于:通过网络向公众传播、复制、摘编、表演、播放、展览、发行、摄制电影、电视、录像制品、录制录音制品、制作数字化制品、改编、翻译、注释、编辑,以及出版、许可其他媒体、网站及单位转载、摘编、播放、录制、翻译、注释、编辑、改编、摄制。 6、 投稿人委托我方声明,未经我方许可,任何网站、媒体、组织不得转载、摘编其作品。
自动驾驶背后的传感器终局猜想
作者:网站采编关键词:
摘要:编者按:本文来自微信公众号“峰瑞资本”(ID:freesvc),作者:杨永成,36氪经授权发布。 近几年,自动驾驶始终是一个热门话题。百度、华为主打L4技术,小鹏、蔚来等造车新势力比
编者按:本文来自微信公众号“峰瑞资本”(ID:freesvc),作者:杨永成,36氪经授权发布。
近几年,自动驾驶始终是一个热门话题。百度、华为主打L4技术,小鹏、蔚来等造车新势力比拼自主泊车与ADAS(高级辅助驾驶系统)的推送更新,苹果虽未官宣,但也在研发无人驾驶技术。就此方向,峰瑞资本进行了大量的研究和讨论,并在投资实践中布局了10余个激光雷达、毫米波雷达及上下游项目。
过去几年,我们对自动驾驶行业发展态势的基本判断,主要是以下几点:
自动驾驶是汽车行业的未来,对这一点要充满信心,但技术和应用的发展是循序渐进的,需要花大量的时间验证、发展,才能到达L3、L4水准。
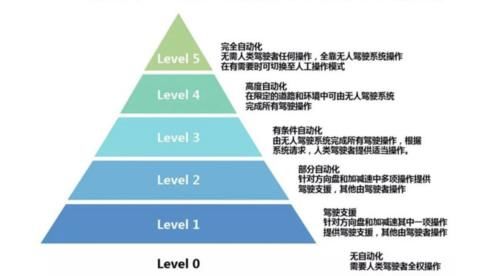
L3指有条件的自动化;L4指高度自动化,具体可参照SAE汽车工程师学会对自动驾驶汽车的分级。按照北美标准,可能未来要发展到Level5,才能实现理想状态中、无需方向盘的全无人驾驶。
传感器会早于自动驾驶系统完善前上车,并且会从辅助驾驶开始切入,逐渐积累数据、优化系统和技术,由简入难,由辅助、半自动,最终实现高度自主、自动驾驶的L4级别。
传感器维度,始终相信多传感器融合是自动驾驶的最合理配置,主要传感器有摄像头视觉、激光雷达、毫米波雷达。
从过去几年自动驾驶发展的情况看,大量量产汽车已经或多或少具备了辅助驾驶能力,少数品牌甚至有了L3、L4 等级的尝试,各种传感器也开始配置到量产车上,不仅有视觉摄像头,还有毫米波雷达、激光雷达。在这篇里,我们就自动驾驶所涉及的传感器做一些分析,希望能提供新的思考角度。
自动驾驶——多传感器融合背景下的OPA激光雷达
关于自动驾驶的传感器配置,业内主要分歧是:技术趋势到底是单独视觉摄像头,还是摄像头、激光雷达、毫米波雷达多传感器融合。
这个问题之所以很热,又很有争议性,首先在于,自动驾驶技术是一个庞大的软硬件高度融合的技术生态。任何一种传感器的选择,不是独立的硬件选择,它涉及配套的软件、算法还有大规模的AI相关的数据积累,是牵一发而动全身的技术生态的选择。所以,任何一个硬件传感器的引入,都需要投入大量配套的软硬件技术,以及长期的大数据积累,要慎之又慎。
另外,提起传感器配置方案的争议性,则少不了特斯拉对单独摄像头方案的坚持,还有马斯克对技术舆论的引导。依据公开报道,马斯克曾直言,特斯拉的自动驾驶系统过去和未来都不会用激光雷达。根据财经网的报道:“特斯拉CEO马斯克曾经表示,激光雷达就像人身上长了一堆阑尾,阑尾本身的存在基本是无意义的;任何依赖激光雷达的公司都可能无疾而终。”
01 路线之争:为什么多传感器融合未来比单独摄像头更合理?
要想分析清楚自动驾驶传感器的配置问题,回答为什么多传感器融合未来比单独摄像头更合理,我想至少应该先回答以下两个问题:
特斯拉为什么坚持单独摄像头方案?
首先,我们要清楚特斯拉是个汽车品牌厂,或者叫整车厂。特斯拉在汽车产业链的整体定位是整车集成,即选择汽车行业庞大供应体系(Tier 1)里适合自己整车产品定义的汽车组件,比如电机、电控、机械结构、多媒体等,最后组装、生产成汽车。
从这个维度看,特斯拉对汽车配件和技术维度应该是“拿来主义的“和“中立的”。那为什么特斯拉会反对多传感器,特别是激光雷达呢?
问题可能出在激光雷达本身:一个是技术还不完善,特别是能生产符合车规标准的真正固体的激光雷达的企业暂不具备量产能力,另一个问题是激光雷达的价格还没有低到合理、普适的位置。一言以蔽之,还没有合适的激光雷达可以上车量产。
由此,假定我们站在特斯拉和马斯克的角度来思考:作为自动驾驶汽车品牌的领导者和自动驾驶概念的最大商业受益者,特斯拉已经有一套视觉摄像头方案量产,获得了市场的认可,同时积累了大量的数据;作为摄像头自动驾驶最成功的商业案例,特斯拉对单独摄像头方案充满信心,并输出这个信心给市场和用户,是完全必须和应该的逻辑。相反,如果这个时候站出来说多传感器融合,多少有可能被“误读”成单独摄像头方案还有些许缺陷和不足,将来需要其他传感器来补充。
对于汽车这种长生命周期的产品而言,这种信息导向,很可能打击一些潜在用户的买车欲望,而客观上市场上又确实没有性价比足够高的固态激光雷达可以供特斯拉采用,作为一个成熟、务实的著名汽车厂,这显然是特斯拉时下不希望看到的“死循环”局面。
文章来源:《传感器与微系统》 网址: http://www.cgqywxtzz.cn/zonghexinwen/2021/0708/397.html
传感器与微系统投稿 | 传感器与微系统编辑部| 传感器与微系统版面费 | 传感器与微系统论文发表 | 传感器与微系统最新目录
Copyright © 2021 《传感器与微系统》杂志社 版权所有 Power by DedeCms
投稿电话: 投稿邮箱: