- · 传感器与微系统版面费是[06/30]
- · 《传感器与微系统》投稿[06/30]
- · 《传感器与微系统》期刊[06/30]
一、稿件要求: 1、稿件内容应该是与某一计算机类具体产品紧密相关的新闻评论、购买体验、性能详析等文章。要求稿件论点中立,论述详实,能够对读者的购买起到指导作用。文章体裁不限,字数不限。 2、稿件建议采用纯文本格式(*.txt)。如果是文本文件,请注明插图位置。插图应清晰可辨,可保存为*.jpg、*.gif格式。如使用word等编辑的文本,建议不要将图片直接嵌在word文件中,而将插图另存,并注明插图位置。 3、如果用电子邮件投稿,最好压缩后发送。 4、请使用中文的标点符号。例如句号为。而不是.。 5、来稿请注明作者署名(真实姓名、笔名)、详细地址、邮编、联系电话、E-mail地址等,以便联系。 6、我们保留对稿件的增删权。 7、我们对有一稿多投、剽窃或抄袭行为者,将保留追究由此引起的法律、经济责任的权利。 二、投稿方式: 1、 请使用电子邮件方式投递稿件。 2、 编译的稿件,请注明出处并附带原文。 3、 请按稿件内容投递到相关编辑信箱 三、稿件著作权: 1、 投稿人保证其向我方所投之作品是其本人或与他人合作创作之成果,或对所投作品拥有合法的著作权,无第三人对其作品提出可成立之权利主张。 2、 投稿人保证向我方所投之稿件,尚未在任何媒体上发表。 3、 投稿人保证其作品不含有违反宪法、法律及损害社会公共利益之内容。 4、 投稿人向我方所投之作品不得同时向第三方投送,即不允许一稿多投。若投稿人有违反该款约定的行为,则我方有权不向投稿人支付报酬。但我方在收到投稿人所投作品10日内未作出采用通知的除外。 5、 投稿人授予我方享有作品专有使用权的方式包括但不限于:通过网络向公众传播、复制、摘编、表演、播放、展览、发行、摄制电影、电视、录像制品、录制录音制品、制作数字化制品、改编、翻译、注释、编辑,以及出版、许可其他媒体、网站及单位转载、摘编、播放、录制、翻译、注释、编辑、改编、摄制。 6、 投稿人委托我方声明,未经我方许可,任何网站、媒体、组织不得转载、摘编其作品。
自动驾驶背后的传感器终局猜想(2)
作者:网站采编关键词:
摘要:既然人类可以只靠肉眼这样单一传感器完成汽车驾驶,为什么AI不能通过视觉摄像头完成自动驾驶? 要想回答这个问题,我们还要对人眼的视觉识别进行稍
既然人类可以只靠肉眼这样单一传感器完成汽车驾驶,为什么AI不能通过视觉摄像头完成自动驾驶?
要想回答这个问题,我们还要对人眼的视觉识别进行稍微深入一点儿的分析。
首先,人眼的视觉是个高度智能化、自动化的复杂系统,具有定焦、对焦、变焦、多区域视觉等等功能。
比如驾驶过程中,我们的视线会在远景、近景切换焦距和成像,并且在即便是近景的情况下,对远景的目标,特别是运动目标也具备检测功能,从而在远处有运动目标的时候,通过调整眼球晶状体将成像面快速切换到远距离目标。
与此同时,我们对于需要特别关注的目标,比如路面障碍物,我们可以“定睛一看”,进行特定区域的细致成像,提供局部目标视觉分辨率。
此外,我们还可以通过颈部、头部的动作,调整我们眼睛的视角和视觉范围,避免视觉死角,同时把视网膜有限的成像分辨率用在特别关注的目标区域的成像。
我们还有高度智能化、自动化的瞳孔“光圈”,控制眼睛的进光量,适用于不同的外界光照情况。
而车载自动驾驶电子摄像头,基本都是固定焦距、固定FOV、固定光圈、固定位置安装的,完全不具备人眼的自动化和灵活性。这也解释了为什么人类可以两只眼睛“包打天下”,而自动驾驶要用十几个甚至二十几个摄像头的原因。
举个例子,安装在车头位置的前向摄像头就需要配置多个,用以负责近距离、中距离,远距离的视觉成像。之所以采用多摄像头分工,而不是采用人眼这种“通用”摄像头,除了成本的考量之外,关键还是要实现人眼类似的智能化、自动化,必然使用大量电机、机械运动、控制部件,比如调整焦距的电机,在汽车这种使用环境里是非常有技术挑战的。原因是,汽车的使用环境高低温工作范围大,运动与震动强烈,而无故障运行时间要求很长。
小结一下,由于汽车使用环境的严酷性,大家最终选择了“固态”摄像头,而当前这个“固态”摄像头的智能化、自动化、灵活性水平,和人眼相对比还有很大的差距。
另外,在测量距离这个指标上,摄像头视觉甚至包括人眼,对比起激光雷达都有巨大的劣势。因为从获取距离(深度)信息的原理上,不同于激光雷达的直接测量法,视觉测距的实际精度和准确性都与被测物体,以及背景图像的特点有很大的相关性,这种测距原理,在特殊的背景和目标场景下,就有可能会出现测距算法失效的可能性。而人眼还可以通过歪歪头等“机械”动作,调整一下视角,获取不同角度的图像,提高三角测距法的准确性。
即便如此,人眼对距离感知,对低照度也有先天的不足。好在从进化论的角度,人眼的视觉能力足以“应付”我们进化历史上漫长的“靠腿运动”的“低速” 时代。而汽车这种高速运动的机器诞生的时间,与人类的历史相比极其短暂。
那么,在人类的视觉还没有进化出(或许也不可能进化出)新的传感器功能之前,我们借用一下激光雷达、毫米波雷达这样有专长的传感器测测距离,也许是合理和聪明的选择。就像我们在没有野生动物夜视能力的情况下,可以借用手电筒、汽车大灯,来走暗夜中的漫漫长路一样。
所以,多传感器融合对自动驾驶应该是一个合理和几乎必然的趋势。至于哪种传感器在自动驾驶算法上起的的作用更大,可能不是传感器企业最关心的事情,而是做算法的人更关心的事情。
02 传感的原理:摄像头、毫米波雷达和激光雷达
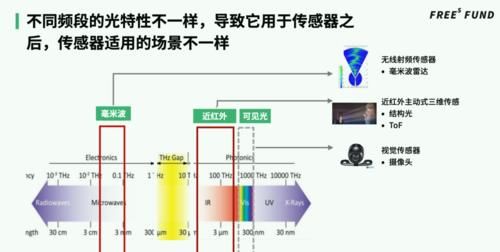
谈到自动驾驶的多传感器融合,主要的还是摄像头、毫米波雷达和激光雷达。关于这三种传感器的大致特点和优缺点,行业里有很多讨论,我们就不赘述了。
需要补充一点的是,从传感的原理上,摄像头和激光雷达本质上都是光学成像。摄像头主要是可见光成像,可借助阳光、路灯、车灯等光源,更容易获得比较高的平面分辨率;而激光雷达使用自己的专用光源,通常是不可见光的红外激光光源,优势在于获得目标距离(深度)的信息;也因为激光雷达使用自带的红外激光光源,具有窄带光谱的特性,天生比自然光成像具有更好的抗干扰性。
同时,因为自发光激光光源的相干性特点,可以采用光通讯行业长期积累的相干接收的技术成果,获得更高的信噪比,在测距的同时获得更多的测量数据,比如目标的运动速度,这也是行业里看好调频连续波(FMCW) 技术的主要原因。
文章来源:《传感器与微系统》 网址: http://www.cgqywxtzz.cn/zonghexinwen/2021/0708/397.html